
استفاده از VFD ها با روش کنترلی درست، میتواند باعث عملکرد صحیح در یک کاربرد شود.
-
روشهای کنترلی و PWM
یک محرکه فرکانس متغیر[۱] (VFD) معمولی میتواند تعداد پارامترهای عملکردی مختلف و متفاوتی، از چند صد تا چند هزار، داشته باشد. دانستن این موضوع که کدام پارامتر و به چه نحوی باید تنظیم شود، میتواند امری چالشبرانگیز باشد. کدام پارامترها مهم بوده و کدامیک اهمیت چندانی ندارند؟ مسلما، یکی از مهمترین پارامترهای VFD که گاهی هم به درستی درک نمیشود، موردی است که (( روش کنترلی )) را تعیین مینماید. استفاده از یک VFD با روش کنترلی مناسب، میتواند باعث کارکرد صحیح و یا نامناسب در یک کاربرد مشخص شود. هنگامی که درکی از مزایا، معایب و مشخصات ویژه هر روش کنترلی به دست آید، انتخاب گزینه مناسب برای کاربرد شما ساده خواهد بود.
در ابتدا، (( روش کنترلی )) چیست؟ بسیاری ار افراد در صنعت تصور میکنند که روش کنترلی یک روش ترتیبی (sequencing method) است که برای کنترل یک VFD در سیستمهای ۲ سیمه یا ۳ سیمه مورد استفاده قرار میگیرد. یک سیستم ۲ سیمه یا ۳ سیمه، پایانههای کنترلی ورودی یک VFD را برای اتصال به کانتکتهای ثابت یا کلیدهای قطع و وصل لحظهای VFD مورد استفاده قرار میدهد. روش کنترلی که این مقاله بر روی آن تمرکز دارد، در واقع تعیین مینماید که VFD چگونه عملکرد موتور را کنترل مینماید. برای تمایز بهتر، میتوانید آن را روش کنترل موتور بنامید. با این حد اندک از معلومات، باید اکنون واضح باشد که چرا این امر دارای اهمیت بالایی در تمامی کاربردهاست.
۴ نوع روش کنترل موتور اساسی وجود دارد که برای کنترل موتورهای القایی متصل به VFD مورد استفاده قرار میگیرد. این روشها عبارتند از: V/F (ولت بر هرتز)، V/F با انکدر، کنترل برداری حلقه باز، کنترل برداری حلقه بسته.
قبل از تعریف این روشهای کنترلی و رمزگشایی از این امر که چه نکتهای هر کدام را متمایز مینماید، یک امر مشترک بین هر ۴ نوع آنها وجود دارد. این امر مشترک، مدولاسیون عرض پالس (PWM) است. PWM روشی است که عرض یک سیگنال ثابت را با مدوله کردن مدت زمان پالس تغییر داده تا بدین صورت، نشان دهنده یک سیگنال آنالوگ متغیر باشد. PWM با استفاده از ولتاژ DC ثابت حاصل از خازنهای لینک DC موجود در VFD، به VFD اعمال میشود. مجموعهای از ترانزیستورهای دوقطبی با گیت ایزوله (IGBT) موجود در خروجی، با قطع و وصل سریع خود، پالسها را تولید مینمایند. با تغییر عرض پالسهای خروجی در شکلموج ولتاژ خروجی، یک شکل موج AC شبه-سینوسی ساخته میشود. (شکل ۱ را مشاهده کنید.) گرچه شکلموج ولتاژ خروجی محرکهها به علت پالسهای DC، شامل موجهای مربعی است، بهعلت ماهیت سلفی موتور، شکل موج جریان سینوسی خواهد بود. تمامی روشهای کنترل موتور از یک شکل موج ولتاژ PWM برای کنترل موتور استفاده میکنند. اختلاف بین روشهای کنترل موتور در فرآیند مورد استفاده برای تعیین ولتاژی که در هر لحظه معین، برای اعمال به موتور مورد نیاز است؛ میباشد.

-
روش V/F
روش ولت بر هرتز، که عموما V/F نامیده میشود، میتواند به عنوان سادهترین روش کنترل موتور در نظر گرفته شود. این روش عموما به علت سادگی قابلیت plug-n-play آن، مورد ترجیح واقع میشود. این روش از آنجایی به عنوان plug-n-play در نظر گرفته میشود که اطلاعات بسیار کمی از موتور برای درایو مورد نیاز است. تنظیم VFD برای موتور متصل شده مورد نیاز نیست (ولی همچنان توصیه میشود.) به انکدر موتور نیازی نیست. انکدر موتور یک وسیله الکترومکانیکی ساده بوده که معمولا بر روی بخش عقب محفظه موتور قرار گرفته و به شفت موتور کوپل میشود. دوران شفت موتور باعث تولید مجموعهای از پالسهای الکتریکی در هر دور (PPR) میشود. این پالسها به VFD بازگشته و به عنوان فیدبک سرعت مورد استفاده قرار میگیرند. روش V/F از انکدر استفاده نمیکند. این امر منجر به هزینه پایینتر و سیمکشی کمتر خواهد شد. روش V/F عموما هنگامی مورد استفاده قرار میگیرد که عملکرد در فرکانس بالا مدنظر باشد (فرکانس میتواند به سادگی از ۱۰۰۰ هرتز بالاتر رود). بیشتر ابزار ماشینکاری و دوکهای نخریسی از روش کنترلی V/F برای این مزیت آن استفاده میکنند.
دیگر مزیت روش V/F آن است که تنها روش کنترلی است که امکان چرخاندن چندین موتور را با یک VFD تکی فراهم میآورد. در زمان گرداندن چندین موتور، تمامی موتور در یک زمان واحد قطع و وصل خواهند شد و نیز یک سرعت مرجع واحد ردیابی میشود.
برخی محدودیتهای روش V/F آن است که هیچ تضمینی نیست که VFD شفت موتور را واقعا بچرخاند. به علاوه، گشتاور راه اندازی موتور به ۱۵۰ درصد در فرکانس ۳ هرتز محدود میشود. گرچه این مشخصه گشتاور راه اندازی میتواند یک نقصان محسوب شود، برای بیشتر کاربردهای گشتاور متغیر، این مقدار کافی خواهد بود. در واقع، تقریبا تمامی کاربردهای فن و پمپ با گشتاور متغیر موجود در صنایع امروزی با روش کنترلی V/f عمل میکنند.
از آنجایی که V/f یک روش کنترلی نسبتا ساده است، دارای برخی مشخصه های نامناسب[۱] میباشد. تنظیم سرعت عموما بین مثبت و منفی ۲ الی ۳ درصد فرکانس حداکثر خواهد بود. پاسخ سرعت در حدود ۳ هرتز است. پاسخ سرعت به صورت میزان مناسب پاسخ VFD به اعمال یک پله در مرجع فرکانس تعریف میشود. افزایش در پاسخ سرعت منجر به پاسخ سریعتر موتور در هنگام تغییر فرکانس مرجع خواهد شد.
به علاوه، هر روش کنترلی دارای یک محدوده کنترل سرعت است که به صورت یک نسبت بیان میشود. محدوده کنترل سرعت روش V/F برابر با ۱:۴۰ است. اگر این نسبت را در حداکثر فرکانس ضرب نماییم، می توانیم حداقل سرعتی را که VFD میتواند تحت آن عمل کرده و همچنان عملکرد کنترل سرعت حفظ گردد؛ به دست آوریم. به عنوان نمونه، با در نظر گرفتن ۶۰ هرتز به عنوان فرکانس حداکثر و ۱:۴۰ به عنوان محدوده کنترلی، درایوی که از روش کنترلی V/F استفاده میکند میتواند موتور را فرکانس ۱٫۵ هرتز کنترل نماید.
آنچه روش V/F را از دیگر روش کنترلی متمایز میکند، نحوه تعیین ولتاژ خروجی ارسال شده به موتور است. این روش کنترلی بدین منظور از (( الگوی V/F )) استفاده میکند. الگوی V/F یک نسبت ولتاژ به فرکانس را تعریف مینماید که موتور باید آن را دنبال نماید. در مرجع سرعت مشخص، یک ولتاژ مشخص به عنوان خروجی برای موتور تعیین خواهد شد. این نسبت معمولاً برای یک پروفیل مشخص یا برای یک کاربرد و موتور مورد استفاده، بهینه سازی خواهد شد. کاربردهایی مانند فنها و پمپها بارهای گشتاور متغیر هستند. یک الگوی V/f گشتاور متغیر باید به منظور جلوگیری از خطاها و بهبود عملکرد و بازده مورد استفاده قرار گیرد. موارد مشابهی نیز باید برای کاربردهای با گشتاور ثابت مانند نوار نقاله ها، اکسترودرها (extruders)، بالابرها و … مورد استفاده قرار گیرند. برای کابردهای گشتاور ثابت، یک الگوری V/f گشتاور ثابت باید در نظر گرفته شود.
به منظور افزایش بازده، در الگوی V/f برای گشتاور بار متغیر جریان مغناطیس شوندگی در سرعتهای پایین تر کاهش مییابد. برای دستیابی به این هدف، میتوان به سادگی ولتاژ موتور را در انتهای سرعت پایین پروفیل کاهش داد. در مقابل، یک بار گشتاور ثابت نیاز به جریان مغناطیس شوندگی حداکثر در تمامی سرعتها دارد. برای این بارها، یک شیب ثابت ساخته شده و در تمامی محدوده سرعت دنبال میشود. (شکل ۲)

روش V/f با انکدر
اگر تنظیم سرعت نسبتا بهتر در کنار قابلیت عملکرد در فرکانسهای مرجع بالاتر مدنظر باشد، روش کنترلی V/F میتواند برای عملکرد با انکدر اصلاح شود. اضافه کردن فیدبک انکدر به روش کنترلی V/F میتواند میزان تنظیم سرعت را به مثبت و منفی ۰٫۰۳ درصد فرکانس حداکثر کاهش دهد.
ولتاژ خروجی همچنان با استفاده از الگوی V/f انتخابی تعیین میشود. این امر امکان کنترل سرعتهای بالا بدون پاسخ دینامیکی سریع را فراهم میآورد؛ زیرا ولتاژ و فرکانس از قبل تعیین شدهاند. این روش کنترلی چندان مرسوم نیست؛ چرا که یک انکدر و کارت فیدبک باید خریداری شده و مزایای حاصله در مقایسه با روش V/f استاندارد بسیار کم هستند. گشتاور راه اندازی، پاسخ سرعت، و محدوده کنترل سرعت تماما مشابه با روش V/f ذکر شده در بالا (معمولی) هستند. عملکرد در فرکانس کاری بالاتر به وسیله PPR انکدر محدود میشود.
-
روش برداری حلقه باز
روش برداری حلقه باز (OLV)، که گاهی اوقات روش برداری بدون سنسور نامیده میشود، نسبتا متفاوت از روش کنترلی V/F است. همانگونه که از نام آن پیداست، عنوان حلقه باز بدان معناست که از انکدری استفاده نمیشود. هدف اصلی روش کنترلی OLV دستیابی به دینامیک بهتر برای کنترل موتور است. کنترل برداری برای دستیابی به کنترل مستقل سرعت و شار موتور، مشابه با کنترل موتور DC، مورد استفاده قرار میگیرد.
زمانی که از OLV استفاده میشود، موتور میتواند ۲۰۰ درصد گشتاور نامی را در ۰٫۳ هرتز تولید نماید. گشتاور راهاندازی بالاتر در سرعتهای پایینتر، امکان استفاده در بازه وسیعی از کاربردهای گوناگون را فراهم میآورد. همچنین این روش کنترلی امکان عملکرد در محدوده هر چهار ربع گشتاور را فراهم میآورد. محدوده گشتاور اساسا برای محدود کردن گشتاور موتور بهمنظور جلوگیری از صدمه به تجهیزات، ابزارآلات و محصولات است. محدودههای گشتاور، بر اساس جهت چرخش موتور (مستقیم یا معکوس) و اینکه موتور در حالت کاری موتوری یا ژنراتوری عمل میکند، به چهار ناحیه مختلف تقسیمبندی میشوند (شکل ۳) برای یک جازن درب بطری[۱](!) که برای جلوگیری از اعمال گشتاور بیش از حد به درب بطری، نیاز به گشتاور محدود دارد؛ باید یک گشتاور حدی در ناحیه اول در نظر گرفته شود. در مقابل، در کاربرد باز کردن پیچ[۲]، برای چرخش خط (؟) نیاز به جهت چرخش مثبت است ولی برای جلوگیری از ایجاد تنش در اثر حالت ژنراتوری ناشی از کشیده شدن خط، باید یک حد گشتاور منفی در نظر گرفته شود. این کاربرد نیاز به تعیین حد گشتاور در ناحیه چهارم دارد.
علاوه بر محدودیتهای مربوط به گشتاور، روش کنترلی OLV دارای پاسخ سرعت سریعتر (۱۰ هرتز) میباشد که امکان پاسخهای دینامیکی بهتر برای بارهای ضربهای[۳] را فراهم میآورد. نمونهای از کاربرد دارای بارهای ضربهای، سنگشکنها هستند. بار در این کاربرد به صورت مداوم و متناسب با ابعاد و مقدار سنگهایی که در سنگ شکن قرار دارند، تغییر میکند.

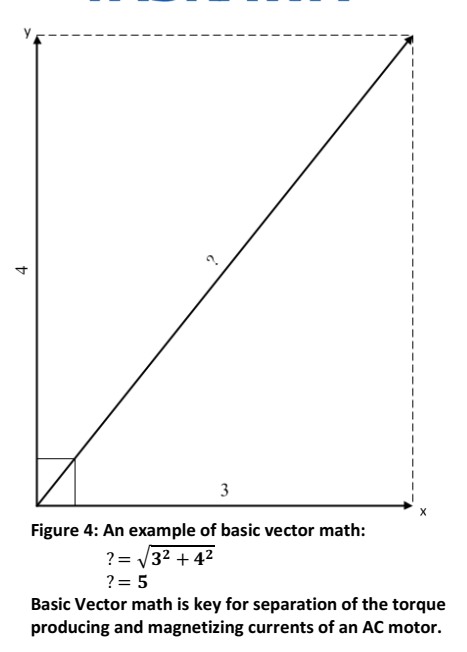
آنچه کنترل برداری را متمایز ساخته و امکان عملکرد مناسب را فراهم میآورد، نحوه تعیین ولتاژ اعمالی به موتور توسط VFD است. تعداد زیادی کتاب، رساله، دورههای آموزشی و انواع تحقیقات و اسناد برای شرح کنترل برداری در طی این سالیان تولید شده است. این مقاله تنها به مفاهیم پایهای کنترل برداری میپردازد. به جای یک الگوی V/F ثابت، OLV از یک الگوریتم برداری برای یافتن مناسبترین ولتاژ خروجی که برای حرکت موتور لازم است، استفاده میکند. روش کنترل برداری این امر را با استفاده از فیدبک جریان از موتور تحقق میبخشد. با استفاده از ریاضیات برداری پایهای، جریانهای موتور به مولفه مغناطیسکنندگی و تولیدکننده گشتاور تقسیمبندی میشود. (شکل ۴) از آنجایی که این روش کنترلی به شدت به دینامیک موتور وابسته است، باید نوعی فرآیند خود-تنظیمی[۱] انجام شود تا مطمئن باشیم که VFD تا حد ممکن اطلاعات موتور را در اختیار دارد.
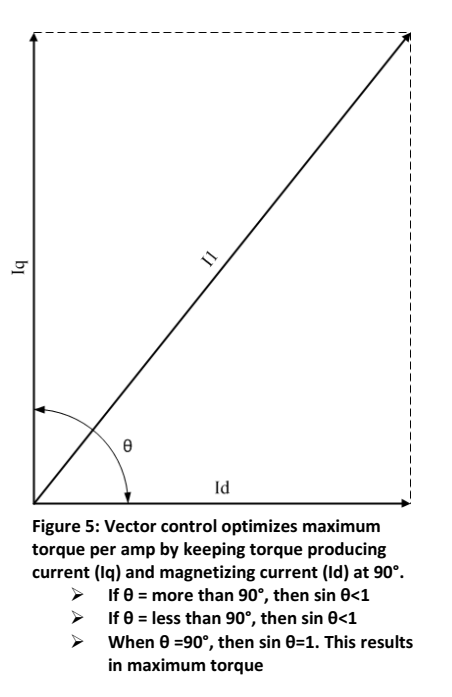
بعد از انجام فرآیند خود تنظیمی VFD برای موتور متصل، اکنون کنترل برداری قابل انجام است. با کمک اطلاعات/پارامترهای قابل اطمینان موتور، VFD میتواند مقدار جریان مغناطیسکنندگی (id) و جریان تولیدکننده گشتاور (iq) را محاسبه نماید. این مقادیر بردار هستند. برای دستیابی به حداکثر بازده و گشتاور، VFD باید این دو مولفه را با ۹۰ درجه اختلاف نسبت به یکدیگر قرار دهد. زاویه ۹۰ درجه از آنجا انتخاب میشود که مقدار سینوس آن برابر یا ۱ است. مقدار ۱، حداکثر گشتاور موتور را نشان میدهد. شکل ۵ را ببینید.
به طورکلی، مشخصه های کنترلی بهتر توسط روش کنترلی برداری قابل دستیابی است. رگولاسیون سرعت در محدوده مثبت و منفی ۰٫۲ درصد فرکانس حداکثر میباشد. محدوده کنترل سرعت تا مقدار ۱:۲۰۰ افزایش یافته که این امر امکان کار در سرعتهای پایین بدون از دست دادن تولید گشتاور را فراهم میکند.
-
روش برداری حلقه بسته
آخرین روش کنترلی که در اینجا بحث میشود، دارای بهترین عملکرد میباشد. روش کنترل موتور برداری حلقه بسته (CLV) همانند روش OLV از الگوریتم برداری برای تعیین ولتاژ خروجی استفاده میکند. تفاوت کلیدی اضافه شدن انکدر است. افزودن فیدبک انکدر به روش برداری، امکان دستیابی به ۲۰۰ درصد گشتاور راهاندازی را در سرعت صفر فراهم میآورد. این ویژگی یک نکته کلیدی برای فروش محصول در کاربردهایی است که نیاز به نگه داشتن یک بار و عدم حرکت دارند این کاربرد میتواند شامل آسانسورها، جرثقیلها و بالابرها باشد.
فیدبک انکدر امکان سریعترین پاسخ سرعت (بالاتر از ۵۰ هرتز) و همچنین بالاترین محدوده کنترل سرعت ۱:۱۵۰۰ را فراهم میکند. علاوه بر این ویژگیهای عملکردی مناسب، روش CLV این قابلیت را دارد که موتور را در وضعیت کنترل گشتاور به حرکت در آورد. حالت کنترل گشتاور این امکان را برای VFD فراهم میکند تا به جای سرعت موتور، گشتاور آن را کنترل نماید. این مورد برای هر گونه کاربردی که در آن گشتاور بر سرعت ارجحیت دارد، ضروری است. دستگاههای پیچنده[۱]، رولینگ[۲]، جازن درب بطری[۳] و کاربردهای web (؟)، مثالهای خوبی از کاربردهایی هستند که در آنها به کنترل گشتاور نیاز است.
-
خلاصه
تخمین زده میشود که موتورها مصرفکننده حداقل ۵۰ درصد از انرژی آمریکا هستند. انتخاب روش کنترلی مناسب برای یک کاربرد این امکان را به موتور میدهد تا با بازده بالاتر، تولید گشتاور حداکثر و عملکرد حداکثر فعالیت کند. عملکرد مناسبتر موتور منجر به مصرف انرژی پایینتر، از کار افتادگی کوتاهتر و همچنین صرفه جوییهای کلی بیشتر خواهد شد.

اصطلاحات بکاررفته در متن
[۱] winder
[۲] rewinder
[۳] capping
[۱] Auto-tune
[۱] Bottle capper
[۲] Unwinding application
[۳] Impact load
[۱] looser
[۱]Variable Frequency Drive
منبع:گروه الکترونیک قدرت دانشگاه تهران

")

