
سلام به علاقهمندان کنترل و ابزار دقیق، این جلسه در مورد اجزای یک سیستم کنترل صحبت می کنیم،سعی من بر این است که تمرکز بحـث بر روی کاربرد کنترل در صنعت باشه اگر کسی علاقهمند هست که در زمینه تئوری کنترل، سیستمهای کنترل خطی و غیرخطی و … بیشتر مطالعه داشته باشه کتابهای بسیار زیادی به صورت الکترونیکی و چاپی وجود داره که من چهار تا از اون ها رو اینجا معرفی میکنم.
1. مهندسی کنترل نویسنده : کاتسوهیکو اوگاتا
2. کنترل مدرن نویسنده : دورف – بیشاپ
3. کنترل غیر خطی کاربردی نویسنده : اسلاتین – یانگ
4. کنترل صنعتی نویسنده : حجت سبز پوشان
-
انواع سیستم های کنترل
- سیستم کنترل حلقه باز
- سیستم کنترل حلقه بسته
-
سیستم کنترل حلقه باز
در سیستم کنترل حلقه باز، ما هیچ اطلاعی از تغییرات خروجی فرآیند مورد نظر نداریم. یک مثال بسیار ساده برای توصیف سیستم حلقه باز استفاده از روش pwm برای کنترل سرعت دور یک عدد dc هست. در این روش ما هیچ اطلاعی از سرعت واقعی موتور نداریم و تغییرات سرعت با کم و زیاد کردن درصد سیکل وظیفه موتور حاصل میگردد.


لینکهای زیر در تکمیل این بحث پیشنهاد میشود.
Open-loop system
Open-loop control system
-
سیستم کنترل حلقه بسته
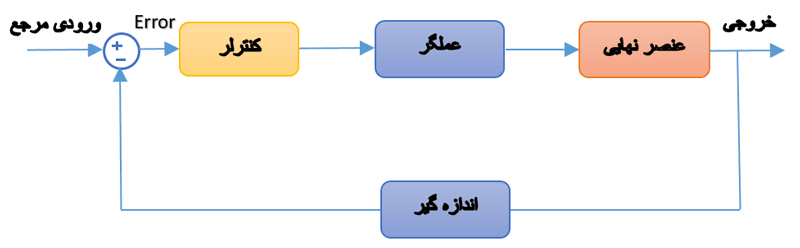
ممکن است در برخی کاربردها نیازی به اندازه گیری سرعت موتور نباشد اما در بسیاری موارد به دلیل وجود اغتشاش، تغییر بار اعمال شده به محور موتور و … کنترل حلقه باز پاسخگو نیست و باید مقدار سرعت موتور با مقدار مطلوب مقایسه شود تا در صورت داشتن انحراف از مقدار مرجع توسط کنترلر عمل اصلاح انجام گیرد، همینطور زمانی که قصد تنظیم دمای یک کوره بر روی مقدار مشخصی داریم اندازه گیری دمای کوره جهت داشتن بهترین عملکرد ضروری است. عمل اندازه گیری خروجی فرآیند و مقایسه با مقدار مرجع را فیدبک منفی می گویند. شکل 3 یک سیستم کنترل حلقه بسته را در حالت کلی و ساده شده نمایش میدهد.
مـثال موتور را میتوان در حالت حلقه بسته به صورت شکل 4 نشان داد.

-
اجزای سیستم کنترل
اندازه گیر(Sensor) خروجی فرآیند را با استفاده از روشهای مرسوم اندازه گیری به سمت مقایسه کننده و کنترلر میفرستد. بسته به نوع فرآیند سنسورهای گوناگونی جهت اندازه گیری پارامترهایی مانند دما، سطح، دبی، سرعت و… استفاده میشود، که در آینده توضیح داده میشود.
کنترل کننده (Controller) حساسترین و مهمترین بخش از یک سیستم کنترل است. همچنین برای طراحی و انتخاب نوع کنترلر نیاز به شناخت و تحلیل دقیق فرآیند میباشد.
وظیفه کنترل کننده تجزیه و تحلیل مقدار اختلاف مابین خروجی فرآیند و مقدار مطلوب و تولید خروجی مناسب به سمت عنصر نهایی جهت اصلاح رفتار سیستم است، به طوری که پایداری سیستم از بین نرود و کمترین خطا و انحراف در خروجی وجود داشته باشد. بسته به نوع فرآیند و امکانات موجود میشود از روشهای کنترل خطی مانند:
- کنترل ON / OFF
- کنترلر P , PI , PID
و یا حتی در مورد کنترل روباتها و سیستمهای پیچیدهتر از روشهای کنترل غیرخطی چون کنترل لغزشی و ترکیب روشهای بالا با کنترل تطبیقی، عصبی، فازی و… استفاده کرد.
عنصر نهایی (Final Element) آخرین قسمت از یک سیستم کنترل است و وظیفه اعمال خروجی تولید شده توسط کنترل کننده به فرآیند جهت صفر کردن خطا را بر عهده دارد،در مثال موتور اگر محور موتور یک نوار نقاله را بچرخاند و هدف تنظیم سرعت نوار باشد، در این صورت موتور نقش عنصر نهایی را خواهد داشت.
عناصر نهایی به سه دسته کلی ذیل تقسیم میشوند:
- شیر کنترلی (Control Valve)
- موتور الکتریکی (Electrical Motor)
- گرم کن (Heater)
عملگر یا محرک (Actuator) سیگنال الکتریکی تولید شده توسط کنترل کننده را به سیگنال قابل درک برای عنصر نهایی تبدیل میکند. سیگنال تبدیل شده میتواند الکتریکی و یا یک کمیت فیزیکی باشد. وجود عملگر به این دلیل ضروری است که خروجی تولید شده توسط کنترل کننده را نمیتوان به طور مستقیم به عنصر نهایی اعمال کرد و نیاز به وجود یک مبدل جهت انتقال تصمیم کنترل کننده به عنصر نهایی ضروری میباشد.
ما هیچ گاه پایههای میکرکنترلر را مستقیماً به ترمینالهای موتور متصل نمیکنیم، برای این کار خروجی میکرو را به یک ترانزیستور یا یک پل H میدهیم و موتور را در خروجی این قطعات نیمه هادی متصل می کینم، این ترانزیستور یا پل دقیقاً همان عملگر یا محرک هستند. در برخی کاربردها نیاز به یک کمیت فیزیکی جهت اعمال فرمان به عنصر نهایی است، مثلاً شیر کنترلی که روی مسیر سوخت یک کوره جهت تنظیم سوخت نصب شده است را با سیگنال الکتریکی خروجی کنترلر نمیشود باز یا بسته کرد، برای این کار ما نیاز به یک موتور جهت چرخاندن دریچه شیر و یا هوای فشرده جهت تغییر وضعیت دیافراگم شیر کنترلی داریم. از این رو محرکها نیز به سه دسته کلی تقسیم میشوند:
- محرکهای پنوماتیک
- محرکهای الکتریکی
- محرکهای هیدرولیک
سعی کردم کاملاً خلاصه، مختصر و مفید این قسمت رو تموم کنم و توضیحات کاملتر باشه برای قسمتهای بعد که هر کدوم از اجزای سیستم کنترل رو جداگانه بررسی میکنیم. امیدوارم برای کسایی که مطالعه کردند مفید بوده باشه، لطفاً اگر کمی و کاستی در مطالب وجود داره حتماً در قسمت نظرات گفته بشه.
منبع:سیسوگ


")
